The Mijia sweeping robot is small, but he is indeed a paradox system with 1279 parts. It embodies the wisdom and hard work of the research and development team of Mijia sweeping robot. In one sentence, it is described as: "The rice home sweeping robot is highly intelligent, sweeping clean and sweeping fast!"
The first phase of the dismantling of the Mijia sweeping robot is not just a simple disassembly, but through the disassembly analysis, the whole machine (RF) data test, let everyone understand its working principle from a more in-depth technical perspective, and whether to buy it Value when.
Tools/raw materialsMillet sweeper
screwdriver
Overall analysis
1 appearanceIn terms of appearance, the Mijia sweeping robot adopts a circular design similar to many manufacturers, and has a built-in transparent dust box.
The top uses a self-developed 360° LDS laser ranging sensor. At the same time, the fuselage shell is also equipped with a lightning cover, sound hole, air outlet and charging connection point, suitable for various home environments.
The bottom of the sweeping robot has 3 wheels (2 main wheels + 1 universal wheel) and 2 brushes (main brush, side brush), suitable for all kinds of home environments.
The body of the Mijia sweeping robot is 240px, and this height can be penetrated into the bottom of all furniture for cleaning. The sweeper has an automatic recharge function. When the power is insufficient to support the cleaning task, the sweeping machine will go to the charging station to charge.
In addition, the accessory box contains the power cord, charging stand and sweeper. The design of the charger is very love, allowing the extra wires to be wrapped in the charger.

Compared with random sweeping robots, the biggest advantage of path planning is "intelligence." The path planning capability based on laser ranging is the most competitive configuration of the Mijia sweeping robot. At present, the domestic models with this capability are more expensive.
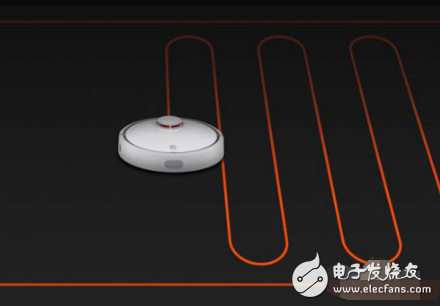
The Mijia sweeping robot has 12 sensors built in, which synchronizes the acquired data information to the three processors in real time, and simulates the way people think in the brain, assists each other, hands over the collected data to the SLAM algorithm, builds the room bottom map, and real-time. Positioning. According to the map division area and the planned cleaning path, a sweeping path along the zigzag shape is formed first, and the partition cleaning task is completed one by one.
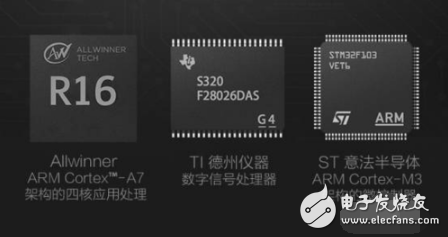
3 hardware configuration:In terms of hardware configuration, Mijia sweeping robot adopts NIDEC brushless wind which can provide maximum wind pressure of 1800Pa, and built-in quad-core application processor of Allwinner ARM Cortel-A7 architecture, TI Texas Instruments digital signal processor, ST STMicroelectronics ARM Cortel-M3 architecture microcontroller. 2.5 hours long battery life, cleaning the effective area of ​​250 square meters on a single charge.
The Mijia sweeping robot also has 12 different types of sensors built in, such as the top laser ranging sensor, the side ultrasonic sensor and the bottom cliff sensor, etc., which can obtain room information in all directions, process sensor information in real time, draw maps, plan path.
The Mijia sweeping robot can provide high-speed mode and low-speed mode for everyone to use. In high-speed mode, when sweeping along the wall or along the obstacle, the side brush runs at 330PRM; in the low-speed mode, when the zigzag is cleaned, the side brush is 130PRM. Running at low speed ensures that the garbage is not being shot. In addition, according to the official statement, the robot always maintains a distance of about 10 mm from the wall during the process of cleaning the gap at the wall.
The Mijia sweeping machine is based on the aerodynamic streamlined air duct design. The bell mouth shape (looks like a reasonable reason, think of the hair dryer) is designed to form a high static pressure zone, which greatly enhances the suction force, while the inner wall of the air duct has a three-stage curved surface design on the windward side. Smoothly guide the airflow, which can greatly improve the air volume utilization.
The robot will plan the cleaning path according to the map drawn by the SlAM algorithm, and with the cooperation of the sensor, it can understand the distribution of indoor ground objects, identify obstacles and plan the cleaning path in real time. Xiaomi also said that the Mijia sweeping robot has a powerful intelligent planning route function, while the general sweeping robot is equipped with a maximum of infrared scanning, which can only sweep the ground in a small area.
At the same time, in order to ensure the cleaning effect and cleaning efficiency, it will adopt the sweeping path of the Z-shape along the edge, complete the partition cleaning one by one, and complete the cleaning task efficiently.



END
Dismantling1 Panasonic imported high energy density 18650 lithium ion battery with a capacity of 5200mAh

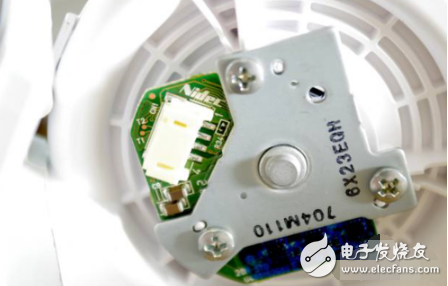
2Nidec brushless motor
PCB board
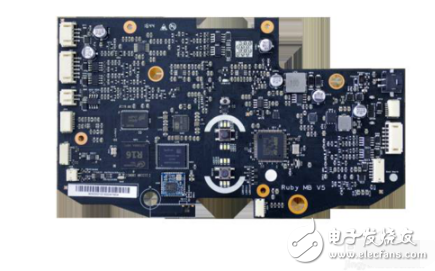
The position of the metal positioning hole under the PCB takes into account the influence on the antenna

RTL8189ETV wireless module and PCB antenna
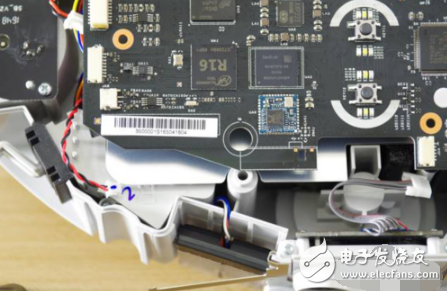
TI Texas Instruments TMS320F28026DAS Microcontroller (MCU)

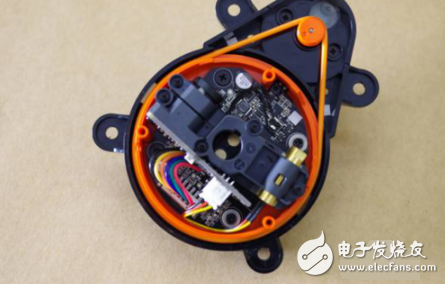
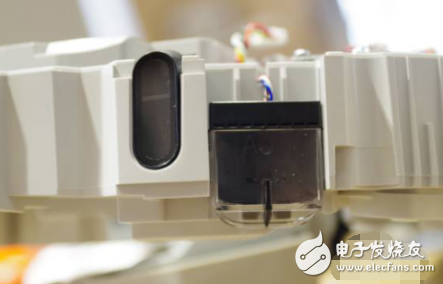
Disassemble the LDS laser ranging sensor. It consists of a main control circuit, a laser emission tube and a receiving sensor.
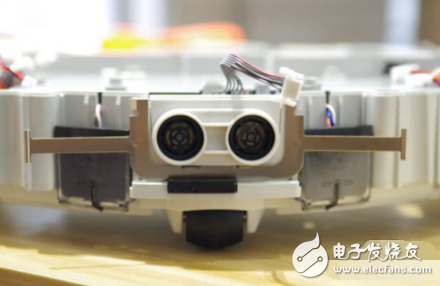
Ultrasonic radar sensor, the whole sensor consists of two parts: the transmitting ultrasound and the receiving ultrasound.
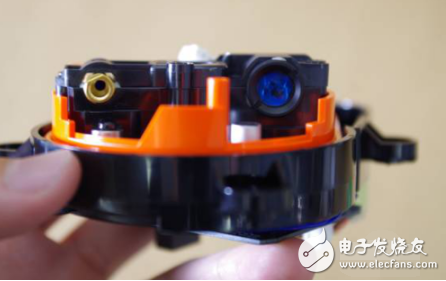
Laser tube and receiver sensor
Original imported NIDEC brushless motor, can reach the maximum air volume of 0.67m3min, the maximum wind pressure is about 1800Pa

Wall sensor and cliff sensor
Dismantling family portrait

Audio Video Cable:Video cable, referred to as video cable, is composed of video cable and connector. Among them, video cable is coaxial shielded cable with characteristic impedance of 75 Ω (Ω). Common specifications are divided into - 3 and - 5 according to wire diameter, single core wire and multi-core wire according to core wire, common specifications of connector are divided into pressure joint and welding joint according to cable end connection mode, and equipment There are BNC (commonly known as bayonet) and RCA (commonly known as lotus head). Audio cable, referred to as audio cable, is composed of audio cable and connector. The audio cable is generally a dual core shielded cable, and the common connectors are RCA (commonly known as lotus head), XLR (commonly known as XLR head) and trsjacks (commonly known as pen plug).
Audio Video Cable
ShenZhen Antenk Electronics Co,Ltd , https://www.pcbsocket.com